Robots seem to be everywhere these days — working in movies, airports, food production, and even factories that make other robots. Robots have many different functions and uses, and as they become easier and cheaper to manufacture, they are also becoming more common in the industry. As the demand for robotics technology increases and robot manufacturers need to keep up, one primary method of manufacturing robotic parts is CNC machining. Read on to learn more about mechanical standard components, suitable robotic materials, and why CNC machining is so important to robotic manufacturing.

CNC Machining is Tailor-Made For Robots
On the one hand, CNC machining enables the production of parts with extremely fast lead times. Almost as soon as you have your 3D model ready, you can start manufacturing components with a CNC machine. This allows rapid iteration of prototypes and rapid delivery of custom robotic parts for special applications.
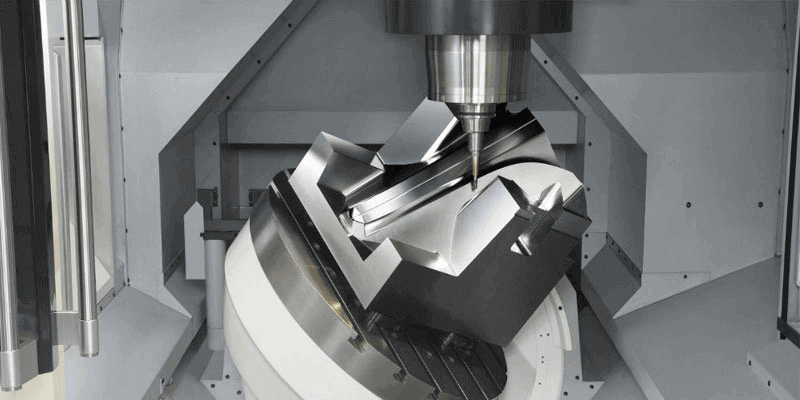
Another advantage of CNC machining is its ability to manufacture parts exactly to specification. This manufacturing precision is especially important for robotics, where dimensional accuracy is key to building high-performance robots. Precision CNC machining can hold tight tolerances of +/- 0.015mm, and this carefully crafted part allows the precise and repeatable movements the robot is known and valued for.
Surface finish is another reason to use CNC machining to produce robotic parts. Interacting parts need to have low friction, and precision CNC machining can produce parts with surface roughness as low as Ra 0.8 μm, and even lower through post-processing operations such as polishing. In contrast, die casting (before any finishing process) typically produces a surface roughness close to 5 μm. Metal 3D printing produces a rougher surface finish.
Finally, the type of material used in the robot is ideal for CNC machining. Robots need to be able to move and lift objects stably, which requires strong, hard materials. These necessary properties are best achieved by machining certain metals and plastics, as described in the Materials section below. Additionally, robots are often used for customs purposes or low-volume production, making CNC machining a natural choice for robotic parts.
Types of Robot Parts Made by CNC Machining
With so many possible functions, many different types of robots have evolved. Several main types of robots are commonly used. Articulated robots have a single arm with multiple joints, which many people have seen. There’s also the SCARA (Selective Compliance Articulated Robot Arm) robot, which can move things between two parallel planes. SCARA have high vertical stiffness because their movement is horizontal.

The joints of the Delta robot are at the bottom, which keeps the arm light and able to move quickly. Finally, gantry or Cartesian robots have linear actuators that move 90 degrees toward each other. Each of these robots has different configurations and different applications, but generally, five main components make up the robot (manipulator, end effector, motor, controller, sensor).
Robotic Arm
Robotic arms vary widely in form and function, so many different components can be used. However, one thing they have in common is their ability to move or perform operations on objects – unlike human arms! Different parts of the robotic arm are even named after ourselves: the shoulder, elbow, and wrist joints rotate and control the movement of the parts in between.
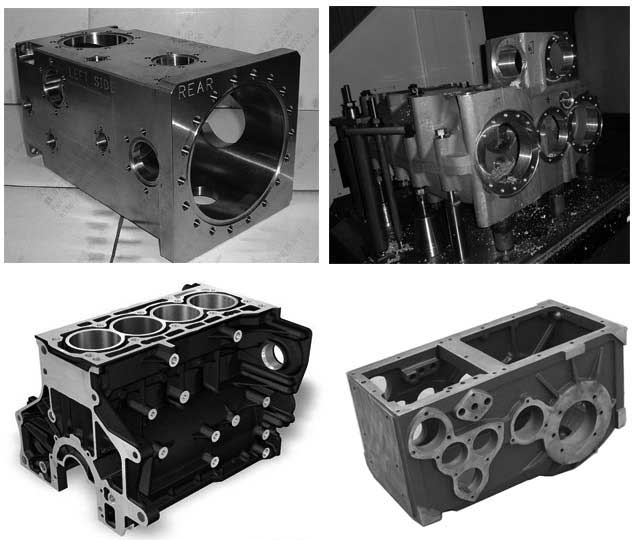
The structural parts of a robotic arm need to be rigid and strong so that they can lift objects or apply force. CNC machining is the right choice due to the materials used to meet these requirements (steel, aluminum, and some plastics). Smaller parts, such as gears or bearings in joints, or the parts of the housing surrounding an arm, can also be CNC machined.
Robot End Effector
An end effector is an attachment attached to the end of a robotic arm. End effectors allow you to customize the functionality of the robot for different operations without building an entirely new robot. They can be grippers, grippers, vacuum cleaners, or suction cups.
These end effectors typically have CNC components machined from metal (usually aluminum, more on material selection later). One of the components is permanently attached to the end of the robot arm. An actual gripper, suction cup, or another end effector (or array of end effectors) mates with this assembly, so it can be controlled by a robotic arm.
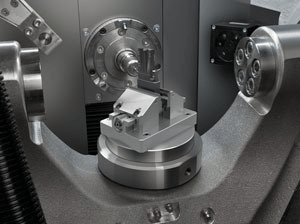
This setup with two different components makes it easier to swap out different end effectors, so the robot can be adapted to different applications. You can see this in the image below. The bottom disc will be bolted to a matching part on the robot arm, allowing you to connect the hose that operates the suction cup to the robot’s air supply. The top and bottom discs are examples of CNC machined parts.
Robot Drive Motor
Every robot needs motors to drive the movement of the arms and joints. Servo motors can be used to power the operation of the robot.
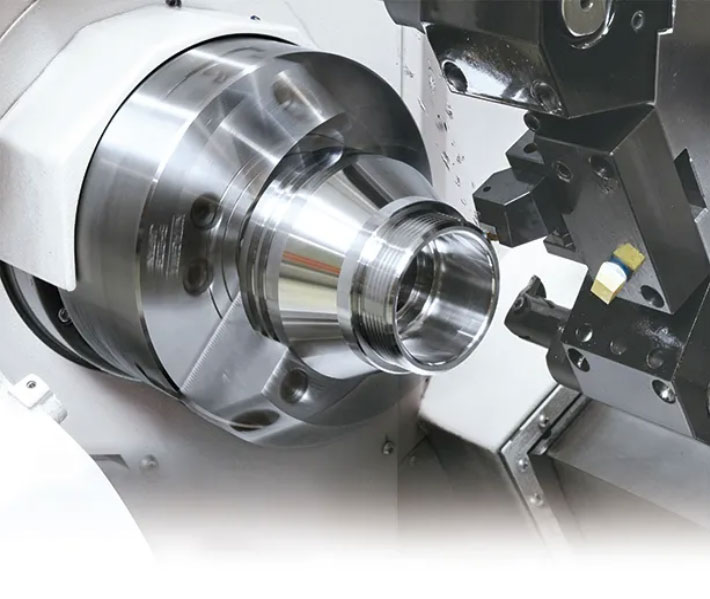
The motor itself has many moving parts, many of which can be CNC machined. Typically, the motor has some kind of machined housing for the power supply and machined brackets for connecting it to the robotic arm. Such brackets are usually CNC machined. And the bearings and shafts of the robot are usually CNC machined. The robot’s axes can be machined on a CNC lathe to reduce diameter or on a milling machine to add special features.

Finally, the gears that transmit motor motion to robot joints or other components can be CNC machined using milling machines, EDMs, or gear hobbing machines.
Controller
The controller is the brain of the robot, it does what you think it will do – it usually controls the precise movements of the robot. As the robot’s computer, it takes input from sensors and modifies the program that controls the output. This requires a printed circuit board (PCB) to house the electronic components. This PCB can be CNC machined to the desired size and shape before adding the electronics.